現在の位置 : トップページ > 2次元画像処理 > 世界座標系画像生成・計測
世界座標系画像生成・計測
本システムはレンズの歪・カメラの姿勢を補正し、実際の世界での単位(マイクロメートル)で表現した世界座標を生成します。
「画像座標系」を1画素何マイクロメートルなのか変換ゲイン(キャリブレーションにより3次元的に計算されたゲイン)を乗ずることにより、実際の「世界座標系」が得られます。
「世界座標系画像」は画素のサイズを指定し生成します。計測精度の向上だけではなく、例えば130万画素の画像を3500万画素まで分解能を高めますので微細な巣・キズ等の検出精度も上がることになります。
■世界座標系画像の特徴
- 1画素のサイズ(単位μm)を指定し、メートル変換した画像を生成します。
- レンズの歪・カメラの姿勢を補正し、完全平面画像を生成します。

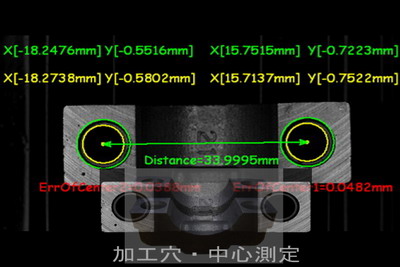
■自動車部品加工穴「世界座標系画像」による計測例 ・・・ インラインシステム
本例はΦ8ノックとΦ6.7貫通穴の中心距離・中心ずれをミクロン精度で計測し、インライン検査をしております。
[測定結果]
Φ8ノック加工の中心距離は33.9995mm
Φ6.7貫通穴の中心ずれ 左穴0.0388mm 右穴0.0482mm
画像処理時間:40ミリ秒
「カメラ姿勢情報」 3D_POSE PARAMETERS
Rotation angle [deg] α357.805 β359.776γ0.269555
Translation vector [mm] x0.000130761 y0.000554479 z0
■2台のカメラで撮像した「世界座標系画像」による計測例
個々のカメラに対して世界座標系画像を生成します。2台の世界座標系画像を合成することにより1枚の大きな世界座標系画像を生成します。これにより広範囲の計測が可能になります。例えば個々のカメラ視野が30mm、カメラ間の距離が200mmであっても各カメラの世界座標系画像を合成し、1枚の大きな世界座標系(平面)画像を再生成し計測が可能です。
参考:個々のカメラで生成された世界座標系画像はレンズの歪・カメラの姿勢を補正した完全平面画像であることが重要です。
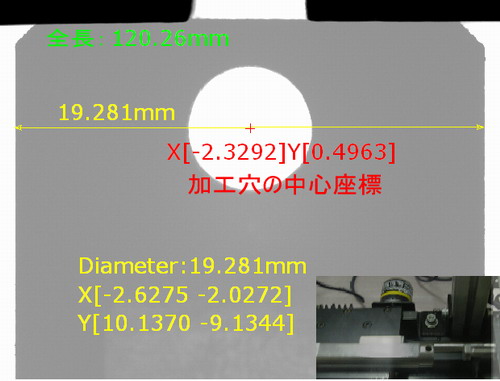
■シャフト径・加工穴等の計測例
本例は丸シャフトの径・加工穴位置・ワーク長を計測し、判別する事例です。
ワーク長は押し当て制御によりサーボシリンダーの位置データより計測しております。
測定結果 外径:19.263mm ワーク長120.24mm
先端部の座標X[-6.7748]Y[0.5665] 加工穴の中心座標X[-2.3080]Y[0.7106]
「カメラ姿勢情報」 3D_POSE PARAMETERS
Rotation angle [deg] α359.264 β1.48007 γ0.810847
Translation vector [mm] x-0.00832788 y0.00194271 z0
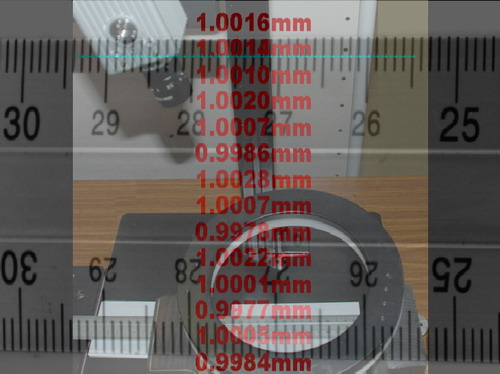
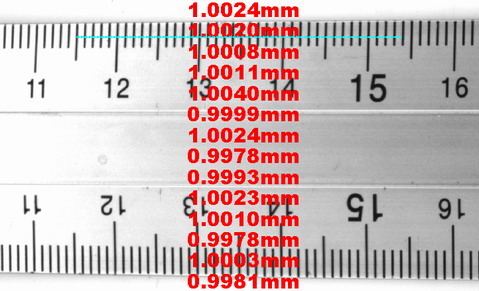
■スケールの計測例
※カメラを傾けて測定
カメラを17度傾けて1mm目盛りの中心間を測定した結果です。
「カメラ姿勢情報」 3D_POSE PARAMETERS
Rotation angle [deg] α358.19 β17.32 γ0.9929
Translation vector [mm] x0.003498 y0.0041579 z0.333298
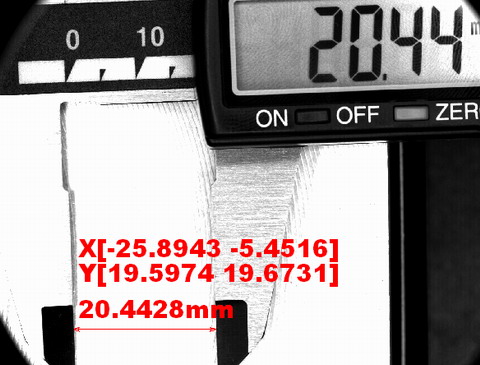
ノギスの測定

※デジタルスケールとの比較
カメラで測定した結果とデジタルスケールの表示を比較した例です。
「カメラ姿勢情報」 3D_POSE PARAMETERS
Rotation angle [deg] α1.18923 β0.113273 γ359.694
Translation vector [mm] x0.002739 y0.0009753 z0